Great students = great projects.
Students complete a significant project in their final term of studies. The following is a selection of projects from the past few years.
Balancing Robot
Team members: Ryan Edwards and Justin Reiher
Description: This balancing robot uses an accelerometer and gyroscope to determine the tilt angle and its rate of change. A C program on an ATMEL 32 bit microcontroller monitors the sensor inputs and determines the motor signal required to keep the robot upright. The microcontroller sends the appropriate PWM signals to the motor drivers.

Elevator
Team members: Kirk Richardson and Brian Donnely
Description: This elevator was built from scratch. It includes a lift motor, floor sensors, floor readouts, and a control pendant. The elevator is controlled by a programmable logic controller (PLC) equipped with remote IO.

Chicory Harvesting Workcell
Team members: Michel van Eekelen and Carlos Rodriguez
Description: The purpose of this project was to build a chicory root workcell to transfer roots from a conveyor to a pallet. Two conveyors were modified, variable frequency drives were installed, and a robot was added. The entire cell was integrated using a PLC.

CNC Router Table
Description: This CNC machine was built from scratch. It includes a steel frame, linear guideways, DC brushed servo motors with 500 line encoders, and a Galil motion control card.

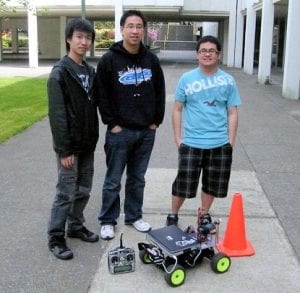
Autonomous Vehicle
Team members: Jan Louis Evangelista, Alfred Lam, Albert Wong
Description: The purpose of this project was to build an autonomous vehicle to compete in the RoboMagellan contest. A 4-wheel drive RC truck chassis was modified with a new motor and controller. A GPS, video camera, electronic compass, and laptop were added so the robot could autonomously navigate between waypoints and locate orange traffic cones.
Coin Processing Workcell
Description: The purpose of this machine was to assemble several components into a finished souvenir token. Coins, cards, and plastic faces were fed via part feeders to two robots. The robots assembled the parts while a third robot places glued on the assembly. The parts were assembled into a finished product and placed into an output tray. The cell was controlled by a PLC. Numerous sensors and pneumatic actuators were used to transfer materials and thermoform the plastic parts.
